

掃一掃咨詢詳情

全國咨詢熱線:
400-626-0576
掃一掃咨詢詳情
全國咨詢熱線:
400-626-0576
聯(lián)系熱線
機(jī)器人手臂操作系統(tǒng)實(shí)驗(yàn)中,X,Y,Z,U,V,W,L,S,H以及后機(jī)器人X,Y,Z,U,V,W,H,L,S資料。X:腰回轉(zhuǎn)角度,Y:肩回轉(zhuǎn)角度,Z:肘回轉(zhuǎn)角度,U:腕俯仰角度,V:腕擺動角度,W:腕旋轉(zhuǎn)角度,L:機(jī)械手在傳送帶上的位置,S:機(jī)械手的速度,H:機(jī)械手開合狀態(tài),0代表開啟,1代表閉合

六軸工業(yè)機(jī)器人一般有6個(gè)自由度,常見的六軸工業(yè)機(jī)器人包含旋轉(zhuǎn)(S軸),下臂(L軸)、上臂(U軸)、手腕旋轉(zhuǎn)(R軸)、手腕擺動(B軸)和手腕回轉(zhuǎn)(T軸)。6個(gè)關(guān)節(jié)合成實(shí)現(xiàn)末端的6自由度動作。

現(xiàn)在說一個(gè)比較專業(yè)的問題,很多人對這個(gè)也是有疑問的,那么就請您跟隨小編的視角了解一下四軸機(jī)器人和六軸機(jī)器人的區(qū)別:主要挑選機(jī)器人的兩種基本類型:四軸SCARA機(jī)器人(以下簡稱四軸機(jī)器人)和六軸關(guān)節(jié)式機(jī)器人(以下簡稱六軸機(jī)器人),向大家闡述其區(qū)別。其中,四軸機(jī)器人是特別為高速取放作業(yè)而設(shè)計(jì)的,而六軸機(jī)器

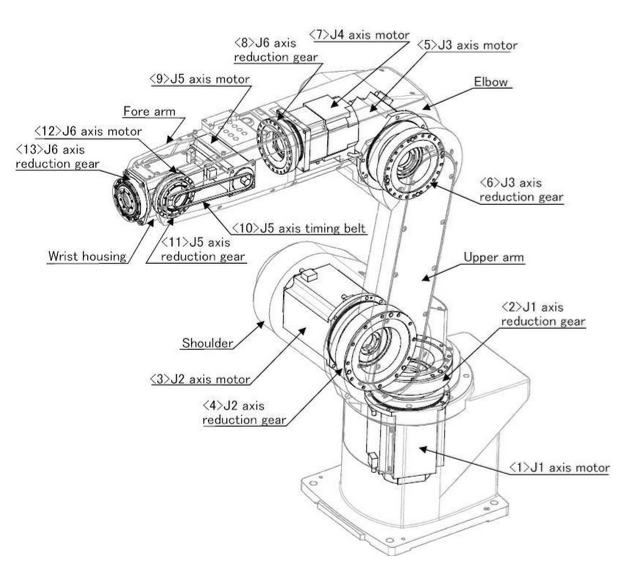
常見的六軸關(guān)節(jié)機(jī)器人的機(jī)械結(jié)構(gòu),六個(gè)伺服電機(jī)直接通過諧波減速器、同步帶輪等驅(qū)動六個(gè)關(guān)節(jié)軸的旋轉(zhuǎn),注意觀察一、二、三、四軸的結(jié)構(gòu),關(guān)節(jié)一至關(guān)節(jié)四的驅(qū)動電機(jī)為空心結(jié)構(gòu),關(guān)節(jié)機(jī)器人的驅(qū)動電機(jī)采用空心軸結(jié)構(gòu)應(yīng)該不常見,空心軸結(jié)構(gòu)的電機(jī)一般較大。
人們常說橡膠粉碎機(jī),那么它究竟是干什么用的呢?其實(shí),橡膠粉碎機(jī)是人們根據(jù)我國的可持續(xù)發(fā)展的政策并且結(jié)合我國的環(huán)境保護(hù)所研發(fā)的一款環(huán)保型機(jī)械設(shè)備。簡單的來說,它就是一種為環(huán)保事業(yè)做貢獻(xiàn)的一種機(jī)械,這種機(jī)械能保護(hù)環(huán)境,可以減少粉塵對環(huán)境的污染。


微信二維碼
服務(wù)熱線